



Because the Spark-980 robot adds the function of autonomous map partitioning, this function allows the robot to autonomously clean the map in different areas.
The old map data saved before may not be used normally. which may lead to the situation that the robot does not return to the charging station normally and cross the forbidden area after using the old map.
You can delete the old map and recreate a new map in the map management!
Here are the steps to rebuild the map:
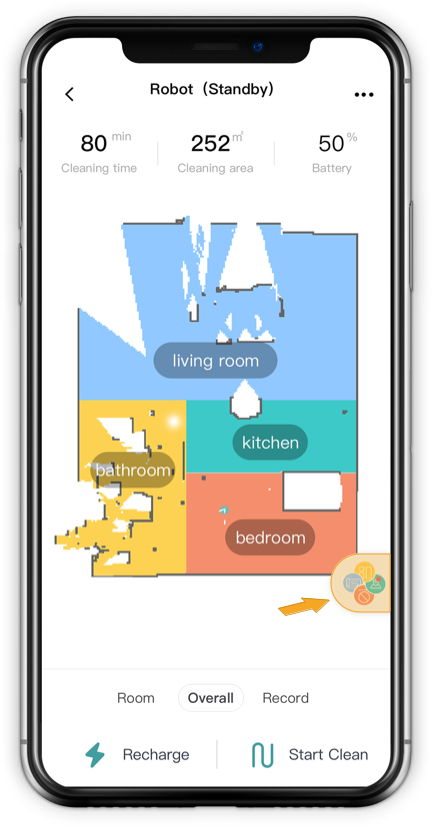
1. Find the button shown by the arrow in the figure and click it
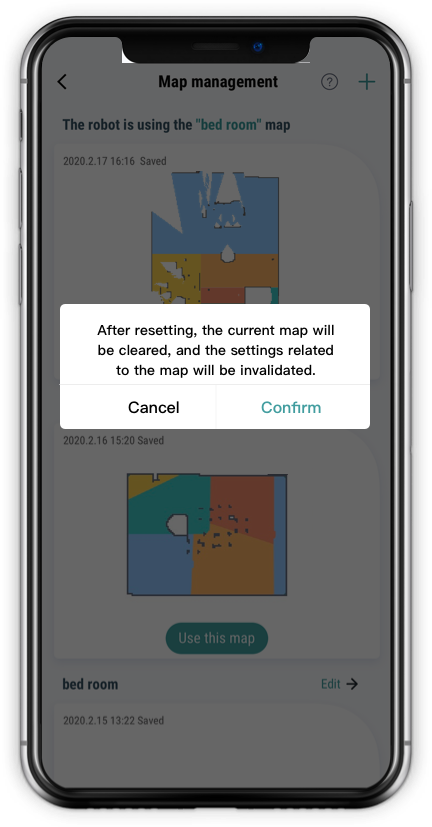
2. Click [Map management]

3. Click [Reset the map]

4. Click [Confirm]
5. Click [Start Clean], wait for the map creation to be completed, update and save the new map data

If you have any questions, please feel free to contact Zigma customer service team via ZigmaAPP or support@zigma.co.